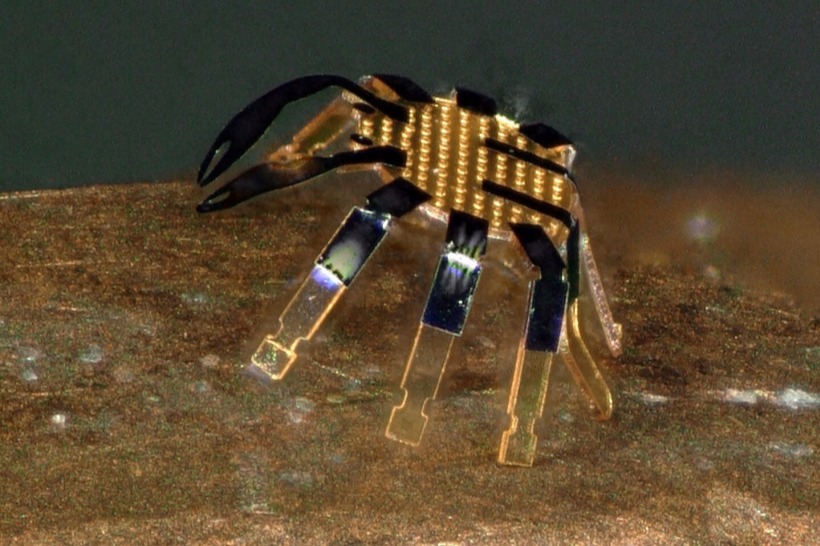
美國西北大學的工程師團隊,成功開發出有史以來最小的遙控步行機器人,更以一種小巧可愛的螃蟹形式出現。這隻微型螃蟹形的機器人,僅有半毫米寬,可彎曲、扭曲、爬行、行走、轉身甚至跳躍。研究人員還開發了形似尺蠖、蟋蟀和甲虫的毫米大小的機器人。
機器人的力量來源在於身體彈性
領導今次研發工作的約翰·羅杰斯表示,機器人學是一個令人興奮的研究領域,其中微型機器人的發展,更是學術探索的一個有趣話題。團隊的研究人員指,新技術能夠實現多種受控運動方式,機器人並且可以每秒一半身長的平均速度行走。對於陸地機器人來說,要在如此小的規模上實現這一點非常具有挑戰性。
微型螃蟹機器人比跳蚤還小,並非由復雜的硬件、液壓或電力驅動,力量來源在於機器人的身體彈性。為了構建機器人,研究人員使用了一種形狀記憶合金材料,這種材料在加熱時會轉變為「記憶」的形狀。研究人員使用掃描的激光束在機器人身體的不同目標位置快速加熱,一層薄薄的玻璃涂層在冷卻時彈性地使相應的結構部分恢復到其變形前的形狀。
以平坦的平面幾何形狀制造結構的前身
隨著機器人從一個階段變為另一個階段,變形為記憶形狀並再次變回,它就會產生運動。激光不僅能遠程控制機器人啟動,掃描方向也決定了機器人的行走方向。例如,從左向右掃描會導致機器人從右向左移動。羅杰斯解釋說,因為這些結構非常小,冷卻速度非常快。事實上,縮小這些機器人的尺寸可讓它們跑得更快。
此外,研究人員還引入了一種受兒童彈出式書籍啟發的組裝方法,研究團隊以平坦的平面幾何形狀制造了行走蟹結構的前身。然后,他們將這些前體黏合到略微拉伸的橡膠基材上。當拉伸的基材鬆弛時,會發生受控的屈曲過程,導致螃蟹“彈出”成精確定義的三維形狀。通過這種制造方法,研究團隊可制造幾乎任何尺寸或3D形狀的步行機器人。
記者:Kit
閱讀更多:

